
Beschickungsanlage für Ionenimplanter:
Aufgabenstellung:
Vorgabe
unseres Kunden war, die Befüllung eines bestehenden Ionenimplanters, bzw. die Entnahme der Wafer daraus zu automatisieren.
Verarbeitet werden zwei verschiedene Wafergrößen (4' bzw. 6'), wobei diese in bereits bestehenden Kunststoffmagazinen bereitgestellt werden.
Um die Zugänglichkeit für diverse Service- und Wartungsaufgaben zu erhalten, ist die Anlage mobil zu gestalten.
Die Schleusentür des bestehenden Implanters ist von einer manuellen Verriegelung auf eine automatische Bewegung und Verriegelung umzugestalten.
Von besonerer Bedeutung sind die Umgebungsbedingungen (Reinraum Kategorie 5) sowie die sehr begrenzten Platzverhältnisse.
Konzept:
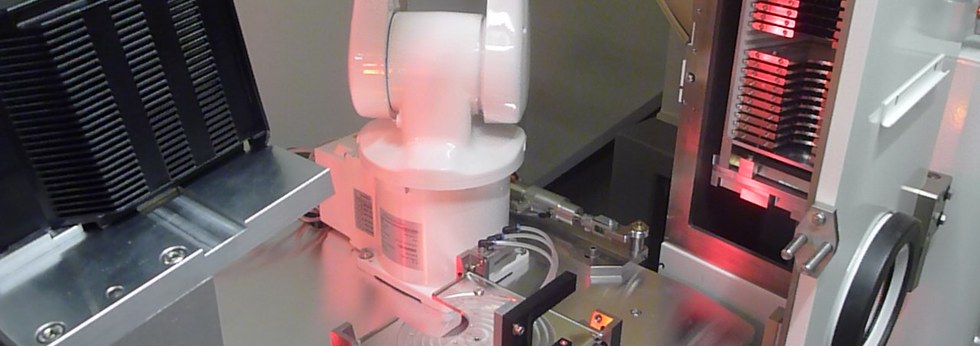
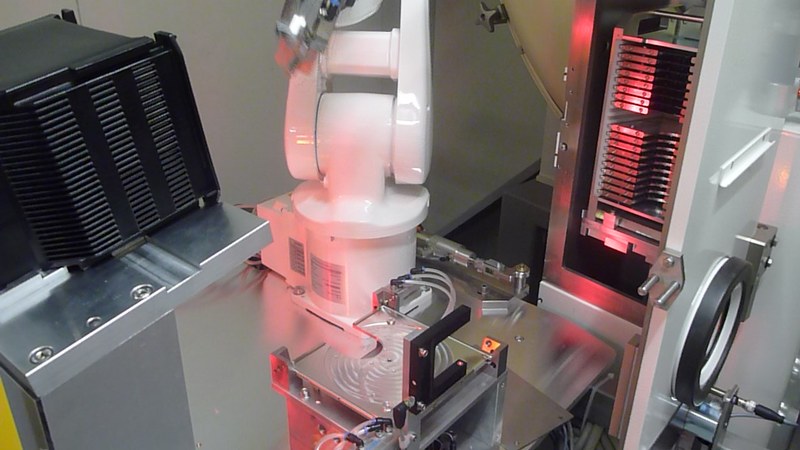
Ein Knickarmroboter übernimmt die Manipulation der Wafer, sowie der bestehenden Teileaufnahmen, auf welchen die Teile dem Implanter zugeführt werden. Dazu wurde ein Kombinationsgreifer gebaut, der die Wafer mit Vakuum, die zugehörigen Aufnahmen mittels Parallelgreifer aufnimmt.
Die Waferaufnahmen werden in eine eigene Entriegelungsvorrichtung eingesetzt, entriegelt, und die Wafer entnommen, bzw. eingesetzt. Da die für das Einsetzen der Wafer erforderliche Positionsgenauigkeit in den Bereitstellungsmagazinen nicht gewährleistet ist, wir die Istposition mittels Meßsystem erfasst und entsprechend die Ablageposition des Roboters korrigiert.
Die bestehende Verriegelung der Schleusentür wurde entfernt und durch eine externe, pneumatisch betätigte Variante ersetzt. Das Öffnen und Schließen der Tür erfolgt durch den Roboter.

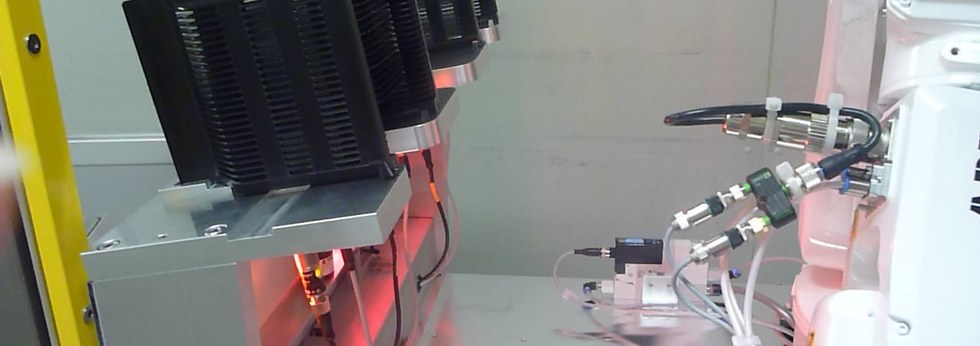
Weitere Bilder der Anlage:

