
Greiftechnik
Jeder Roboter benötigt, um die erforderlichen Arbeiten durchführen zu können, ein passendes Werkzeug. Dies können einersets Bearbeitungseinheiten, beispielsweise zum Entgraten, Bürsten, udgl. sein, oder auch Kleberauftragsdüsen, Spritzeinrichtungen für Lackierarbeiten oder ähnliches sein.
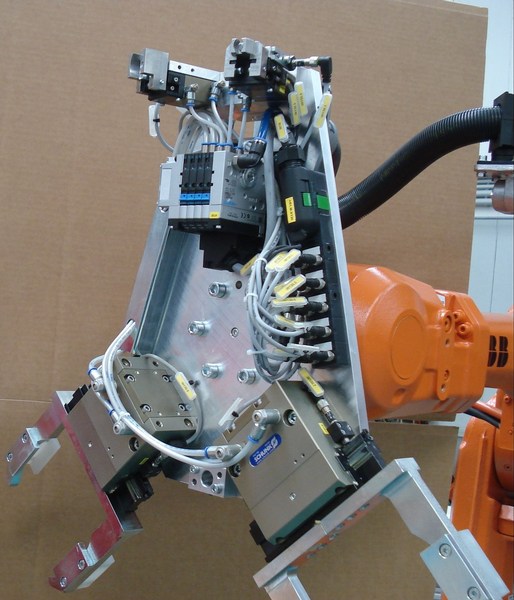
Das bei Weitem größte Einsatzgebiet für Roboter stellt allerdings die Handhabungstechnik dar. Da Vielfalt der handzuhabenden Bauteile, insbesondere unter Berücksichtigung der äußeren Rahmenbedingungen, ist so vielfältig, dass es meist unumgänglich ist, für jede Anwendung speziell gestaltete Greifereinheiten zu entwickeln.
Das Team der Fa. SG-Automatisierungstechnik baut Greifer für Industrieroboter aus den verschiedensten Branchen und kann dabei auf ein langjähriges Erfahrungspotential zurückgreifen. Entsprechend vielfältig sind die dargestellten Beispiele bereits errichteter Greifer.
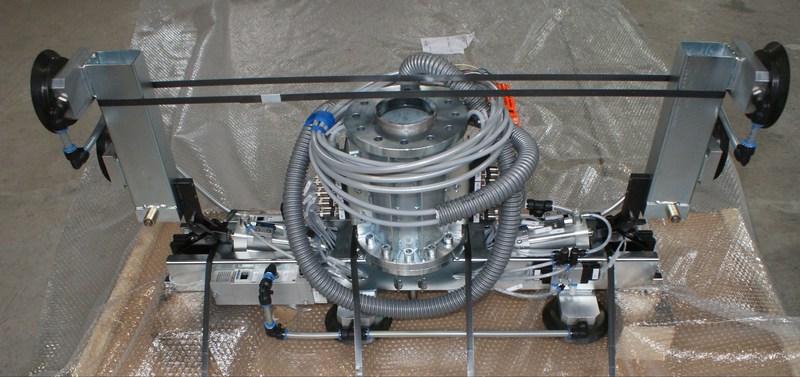
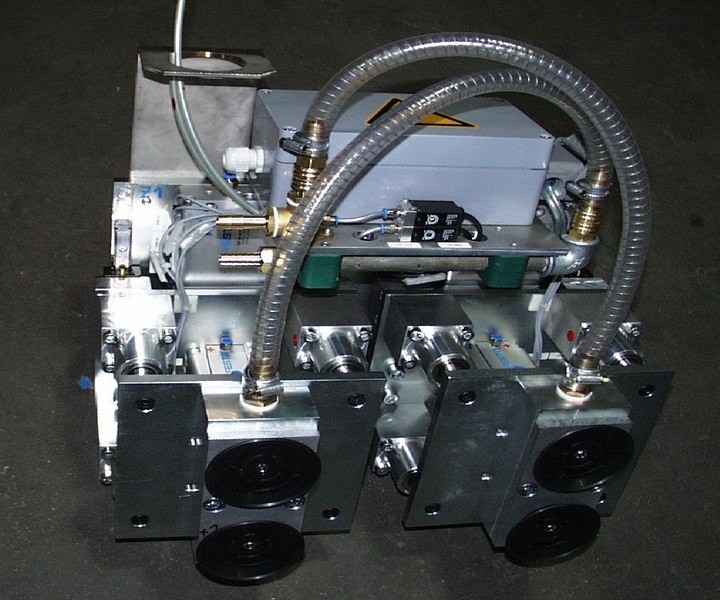
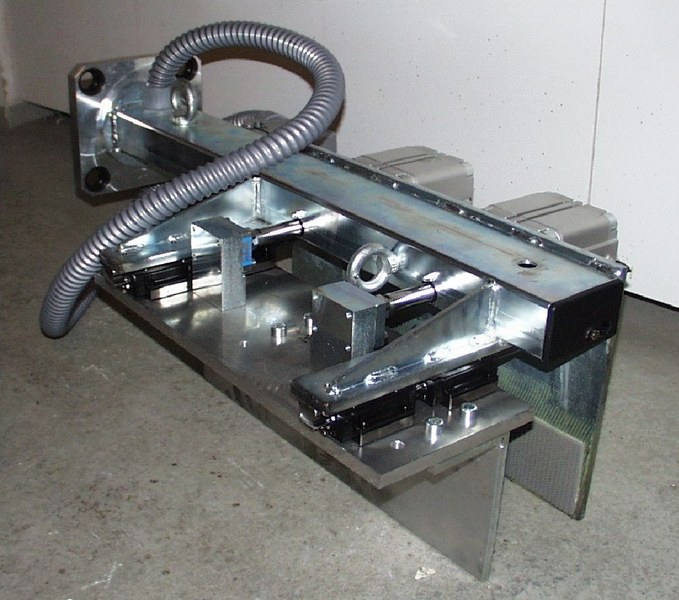
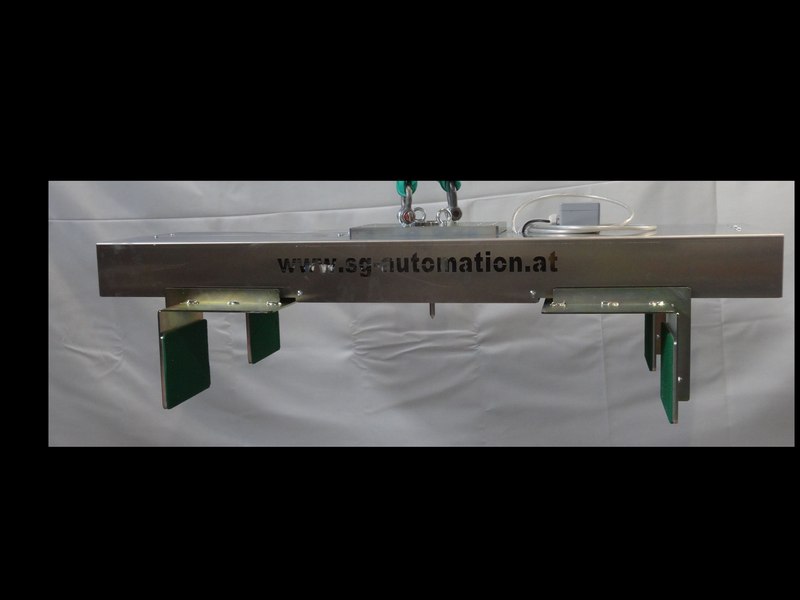
VAKUUM-SAUGGREIFER
Realisiert wurden bereits verschiedenste Varianten von Vakuum-Sauggreifern, mit Venturidüsen oder elektrischen Vakuumpumpen zur Erzeugung des Vakuums. Diese werden mit ausreichender Sicherheit dimensioniert, sind mit einer Teilekontrolle ausgestattet.
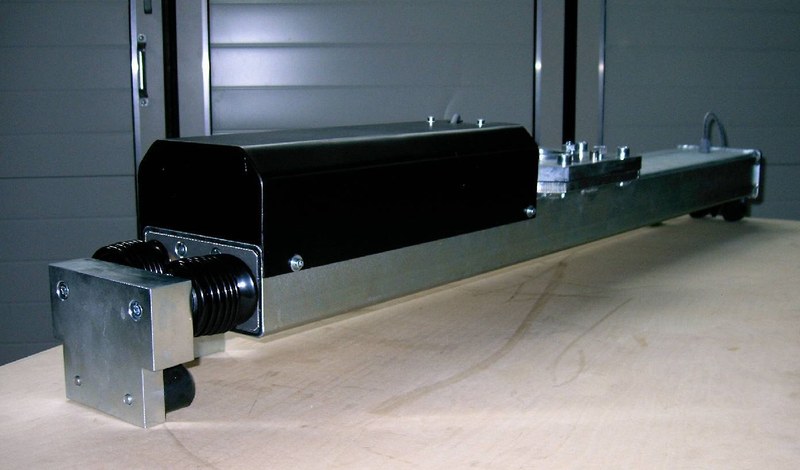
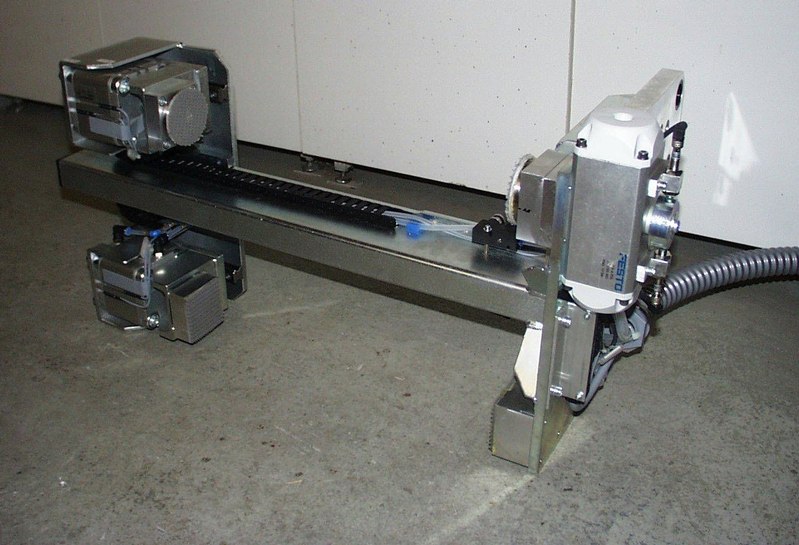
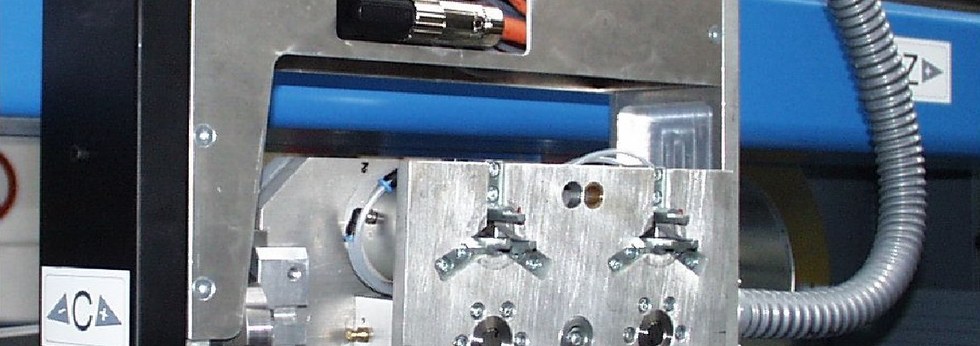
FINGERGREIFER
Fingergreifer kommen in den unterschiedlichsten Ausführungen vor, wobei Zwei-, bzw. Dreifingergreifer in den meisten Fällen als Parallelgreifeinheiten verwendet werden. Hier werden fertige Baueinheiten verwendet, welche mit speziell angepaßten Greiffingern versehen werden.
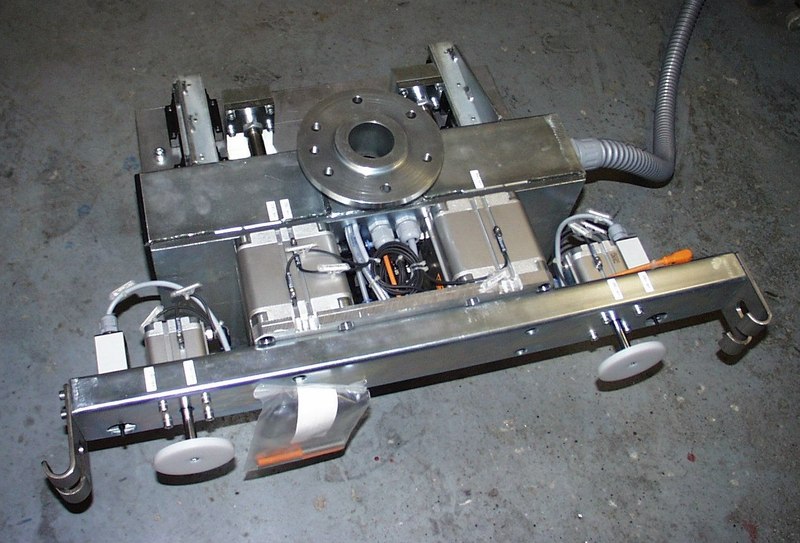
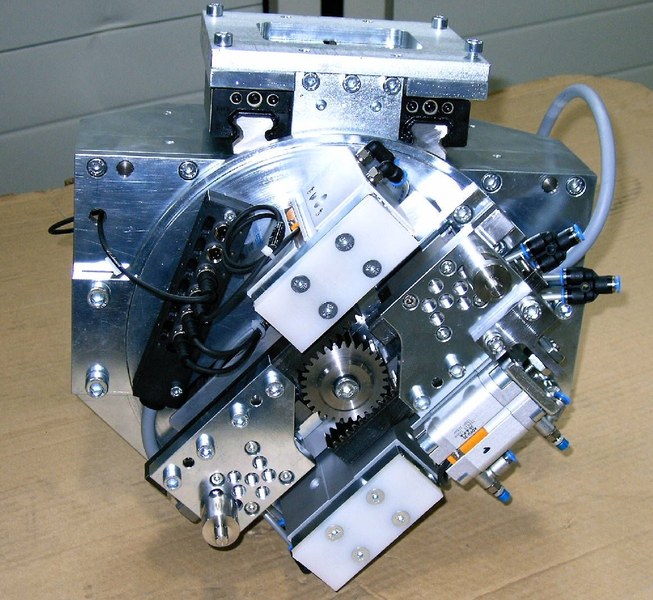
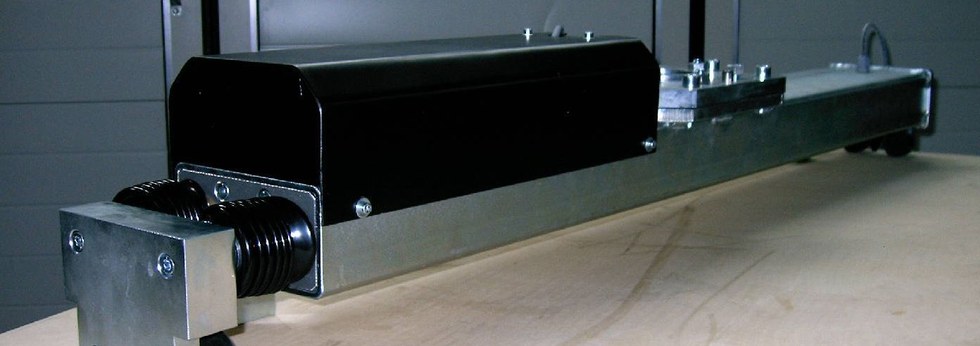
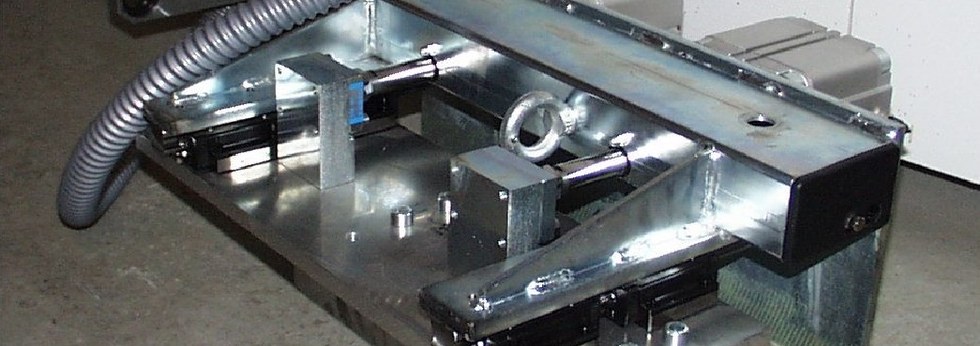
KOMBIGREIFER
In vielen Bereichen ist eine Kombination von verschiedenen Funktionen erforderlich. Dem entsprechend kommen hier Kombinationen von Sauggreifern und Fingergreifern zur Anwendung.